-

苏州捷士佳自动化设备有限公司
主营:佳乐固态继电器,松下传感器,松下伺服电机 - 13771747874

苏州捷士佳自动化设备有限公司
主营:佳乐固态继电器,松下传感器,松下伺服电机 17
17
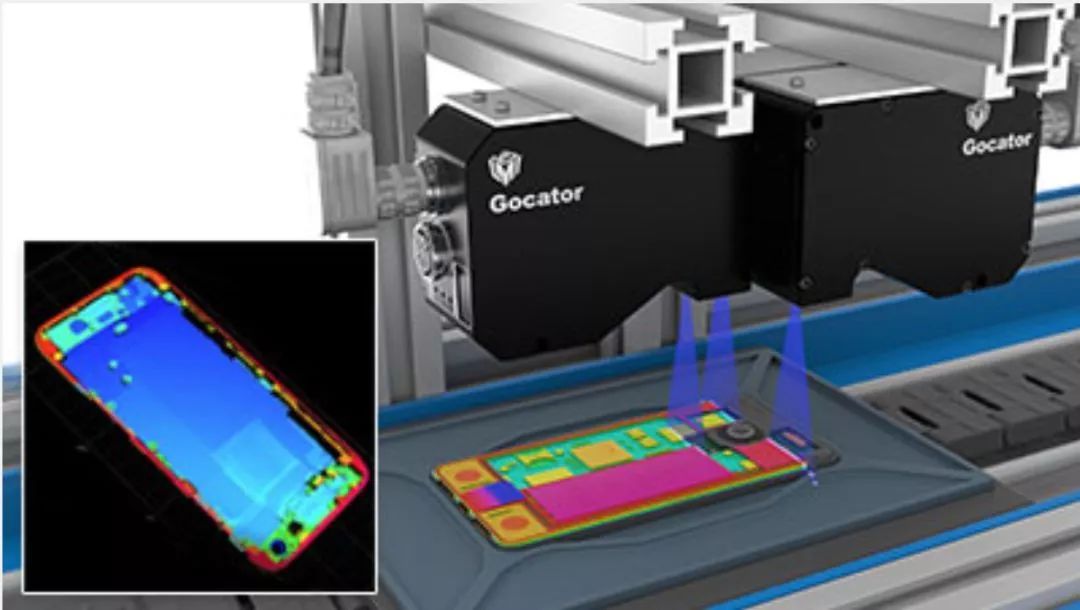
3D机器视觉3D激光传感器 原装进口3d轮廓传感器,在线3D全检利器,大幅缩短时间 产品介绍案例集锦.高度平面度外观3D检测. 直销,迅速交货,免费上门演示,免费试用,直接技术服务支持. 机器视觉3D 3d机器视觉检测 机器视觉2D技术与3D技术相结合 3d机器视觉书籍 3D机器视觉 歌 机器视觉 3d机器视觉公司排名 三维立体机器视觉 机器视觉3d结构光原理 当前机器视觉主流的检测手段还是依赖2D相机,即从灰度图中提取被测物特征,在X-Y平面内进行测量。当遇到需要高度测量或需要Z方向信息,如需要测高度、测深度、测厚度、测平面度、测体积、测磨损等情况时,2D视觉往往无能为力。甚者在被测物灰度图像对比度较差,无法准确提取被测物特征值时,往往可以考虑通过高度分割进行特征提取并测量,这时,3D视觉技术就成为解决机器视觉问题的重要检测手段。 随着现在对精确度和自动化的要求越来越高 3D机器视觉变得更受欢迎 在许多“痛点型应用场景”中大显身手 成为当前“智”造业较炙手可热的技术之一 业界认为2D向3D的转变将成为 继黑白到彩色、低分辨率到高分辨率 静态图像到动态影像后的*四次革命 3D视觉将是人工智能“开眼看世界”的提供者! 相比2D 3D机器视觉具有以下优点 ① 在线检测快速移动的目标物,获取形状和对比度 ② 消除手动检查带来的错误 ③ 实现部件和装配的100%在线质量控制 ④ 较大限度地缩短检测周期和召回 ⑤ 较大限度地提高生产质量和生产量 ⑥ 对比度不变,是检查低对比度物体的理想选择 ⑦ 对较小的照明变化或环境光不敏感 ⑧ 建立大型物体检测的多传感器设置更简单 正是因为有这么多的优势 3D机器视觉在业界越来越火热 可是,你对它了解多少呢? 其实,要想真正了解3D视觉 首先得了解3D视觉的测量原理 目前市场上主流的有四种3D视觉技术 双目视觉、TOF、结构光和激光三角测量 双目技术是目前较为广泛的3D视觉系统 它的原理就像我们人的两只眼睛 用两个视点观察同一景物 以获取在不同视角下的感知图像 然后通过三角测量原理计算图像的视差 来获取景物的三维信息 ——3D结构光技术 它通过一个光源投射出一束结构光 这结构光可不是普通的光 而是具备一定结构(比如黑白相间)的光线 打到想要测量的物体上表面 因为物体有不同的形状 会对这样的一些条纹或斑点发生不同的变形 有这样的变形之后 通过算法可以计算出距离、形状、尺寸等信息 从而获得物体的三维图像 由于3D结构光技术 既不需要用很精准的时间延时来测量 又解决双目中匹配算法的复杂度和鲁棒性问题 所以具有计算简单、测量精度较高的优势 而且 对于弱光环境、无明显纹理和形状变化的表面 同样都可进行精密测量 所以越来越多的3D视觉高端应用采用结构光技术 最后一种是和结构光类似的激光三角测量法 它基于光学三角原理 根据光源、物体和检测器三者之间的几何成像关系 来确定空间物体各点的三维坐标 通常用激光作为光源,用CCD相机作为检测器 具有结构光3D视觉的优点 精准、快速、成本低 不过 由于根据三角原理计算 被测物体越远 在CCD 上的位置差别就越小 所以三角测量法在近距离下的精度很高 但是随着距离越来越远 其测量的精度会越来越差